Шаговый двигатель как подключить – устройство, принцип работы, типы, схемы подключения
устройство, принцип работы, типы, схемы подключения
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
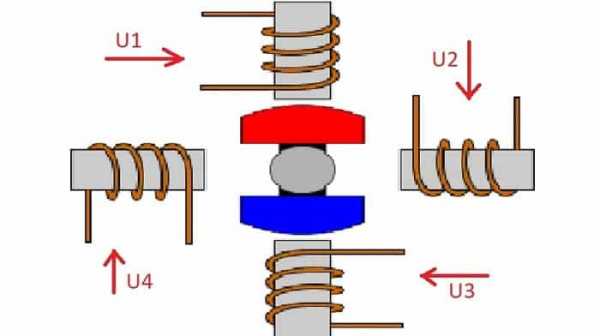
Рис. 1. Принцип действия шагового двигателя
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.

Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
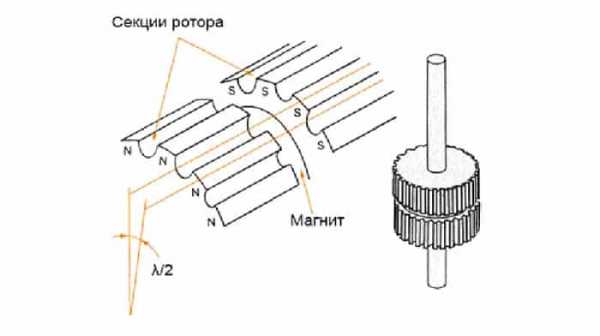
Расположение пазов гибридника
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
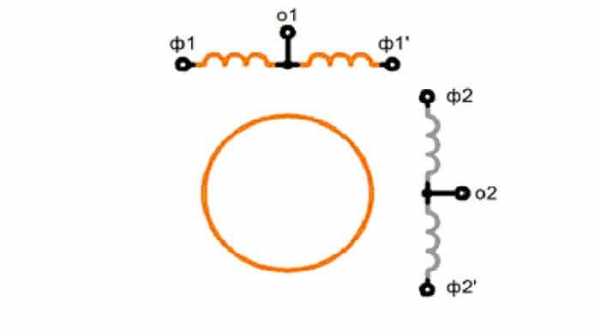
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
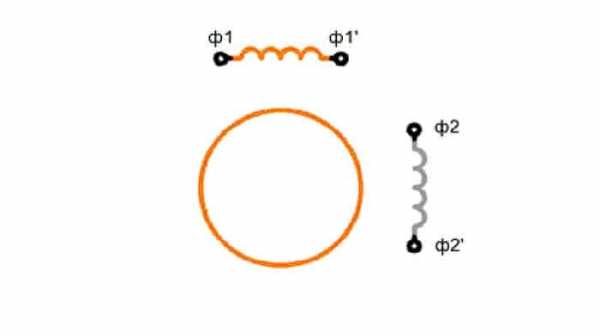
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
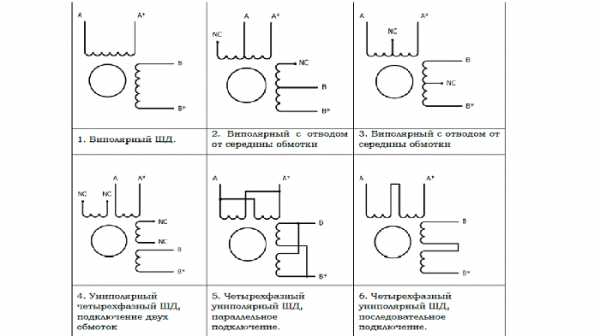
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
Волновое управление
Полношаговый – в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.

Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.

Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
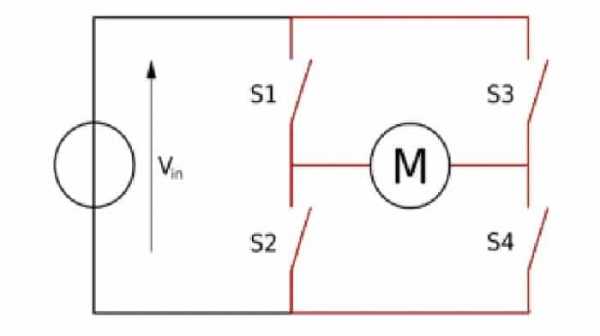
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
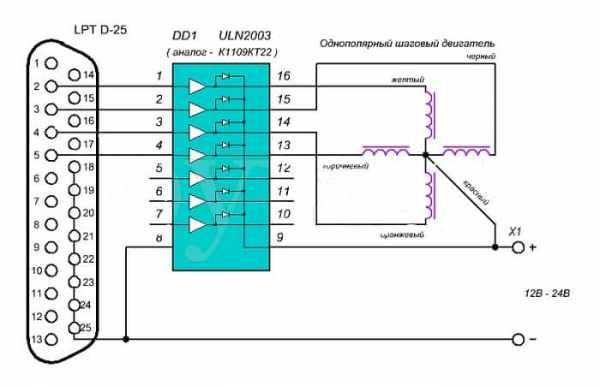
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
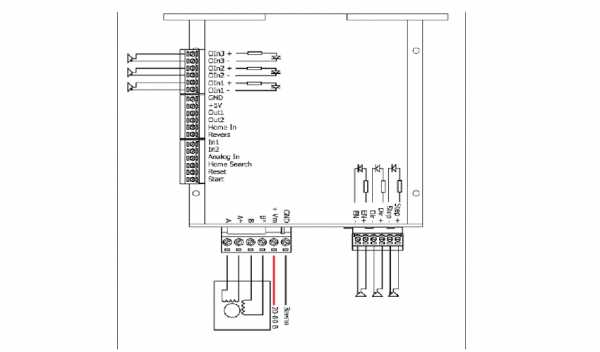
Схема управления от контроллера с дифференциальным выходом
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
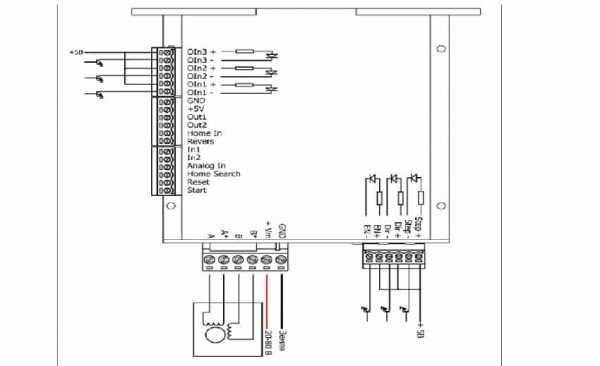
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
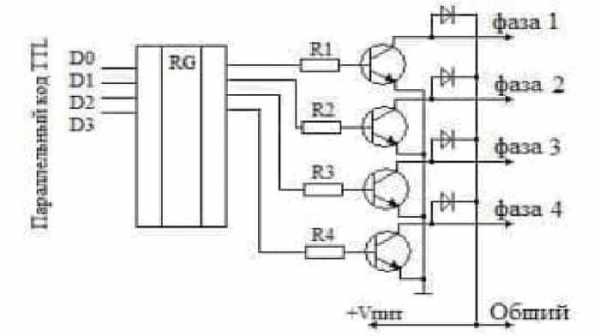
Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
Как запустить шаговый двигатель без электроники своими руками
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.
К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось — я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
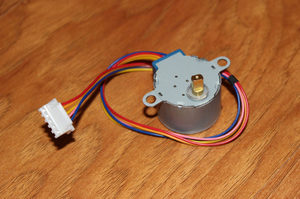
Я взял вот такой двигатель.
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
Схема шагового двигателя
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
Сморите видео
Подключение шагового двигателя: схема подключения
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам. Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов. Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу. Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов. Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
ВНИМАНИЕ – всегда проверяйте цветовую схему выводов, шаговый двигатель от конкретного производителя отличается от абсолютно аналогичного ШД другого производителя, а значит, может иметь другую цветовую схему выводов!
По вопросу подключения шагового двигателя, вы всегда можете обратиться к нашим специалистам по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
Что такое шаговый двигатель, зачем он нужен и как работает
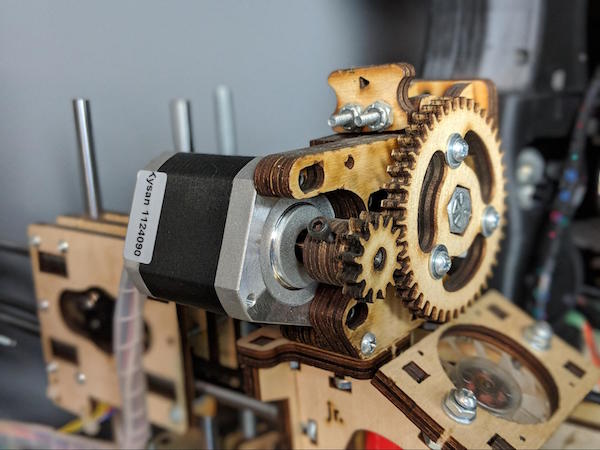
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
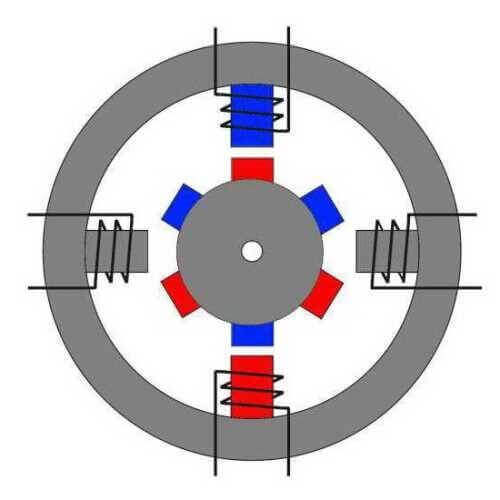
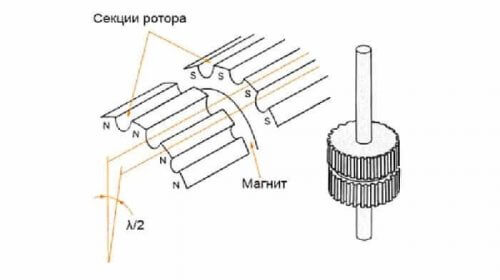
Как устроен шаговый двигатель
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.

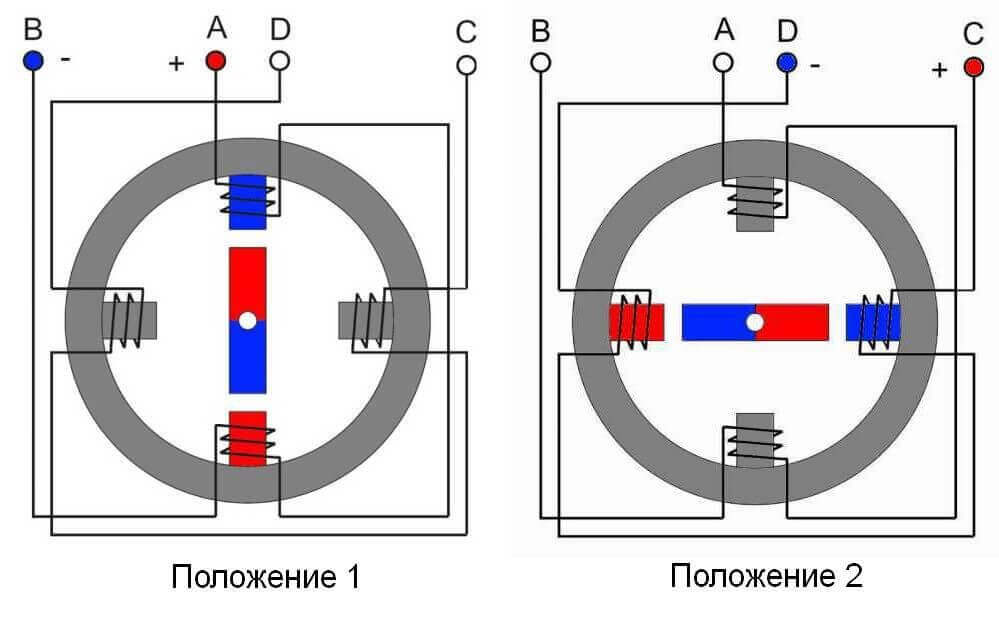
Принцип действия
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
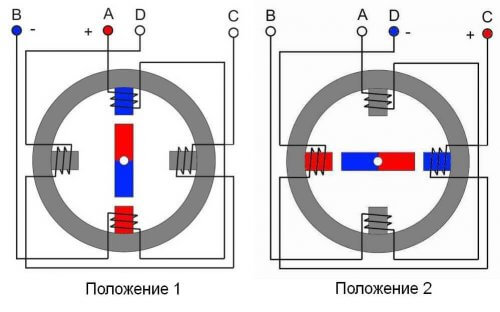
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.
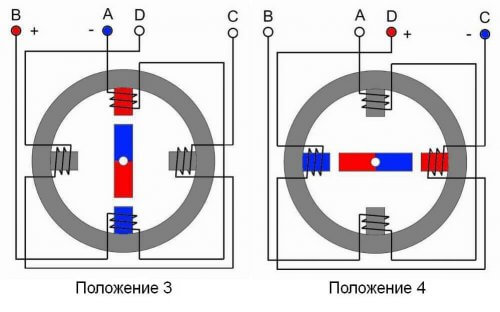
Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.

Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.
ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.
Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.

Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.
То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100. А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.

Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.
Что такое шаговый двигатель и зачем он нужен
Шаг является частью оборота вала мотора . Размер шага зависит от механической части двигателя и от метода управления. Шаговые двигатели подключаются к различным типам питания. В отличие от своих собратьев, шаговый мотор имеет управление импульсами, преобразующимися в градусы, а затем во вращение. Например, 2,2 0 шаговый мотор вращает вал на 2,2 0 при каждом поданном импульсе. Эта характеристика дает повод называть их цифровыми.
Метод действия

Обмотки в количестве 4-х штук стоят по кругу равномерно между собой на статоре. В зависимости от того, как подключены эти обмотки будет определяться тип шагового двигателя. В нашем случае обмотки разделены, мотор с шагом, углом поворота в 90 градусов. Обмотки подключены по кругу. Порядок подключения направление вращения двигателя с шагом. На рисунке видно, что вал вращается на 90 градусов в то время, как ток поступит в катушку, через 1 секунду.Стандартными составляющими шаговых двигателей являются ротор и статор. Ротор включает в себя сердечники, изготовленные из магнитов. Схематически дано изображение.
Режимы управления
При разной подаче тока на катушки вал двигателя вращается по-разному.
Волновое управление
Метод практически нами рассмотрен, волновое действие на катушку. Ток идет через одну катушку. Такой метод редко применяется, характерен пониженным потреблением энергии, дает возможность получения меньше 50% момента вращения двигателя. Большую нагрузку при таком управлении шаговые электродвигатели не выдержат. На один оборот вала приходится четыре шага.
Управление полным шагом
Широко применяемый метод — полношаговый. По этому способу напряжение питания на катушки подается попарно. От того, как подключены обмотки, двигателю необходим двойной ток. Электродвигатель при такой схеме выдаст 100% момента вращения по номиналу.
Полный оборот двигателя соответствует четырем шагам, число шагов по номинальному значению.
Режим полушага
Это оригинальный метод получения двойной точности позиционирования, не изменяя конструкцию двигателя. Чтобы работать по этому способу, подключают одновременно все имеющиеся пары. Ротор поворачивается на 0,5 шага. Такой способ имеет место при применении двух или одной катушки.

Режим с 1 обмоткой Режим с 2 обмотками
По этому способу один и тот же мотор может выдать шагов в 2 раза больше на один оборот. Это значит, что система позиционирования работает с двойной точностью. Наш мотор выдает восемь шагов на один оборот.
Микрошаговый режим
Смысл микрошага заключается в подаче на катушки двигателя напряжения питания сигнала определенной формы, похожей на синус, а не импульсов. При таком методе изменения положения дает возможность получения плавного перемещения.
Благодаря микрошаговому режиму шаговые электродвигатели широко применяются в позиционировании, в программно управляемых станках. Рывки деталей, работающих с двигателем, толчки самого механизма понижаются. В микрошаговом режиме двигатель вращается плавно, как моторы постоянного тока.
Конфигурация графика тока, проходящего по обмотке, сходна с синусоидой. В эксплуатации применяются цифровые сигналы. Их примеры показаны на рисунках.

Способ микрошага — подключение питания двигателя, не управления катушками.

Отсюда следует, что микрошаг применяется при волновом типе.
В микрошаговом типе шаги не увеличиваются, хотя визуально это представляется. Для увеличения точности механизма применяют шестерни с трапецеидальными зубьями, чтобы обеспечить плавный ход.
Типы моторов
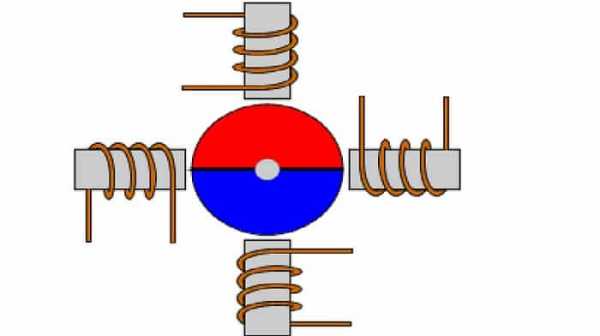
Шаговые электродвигатели с постоянным магнитом
Ротор оборудован постоянным дисковым магнитом с несколькими полюсами. Действует по такому же принципу, как микрошаговый мотор. Катушки статора отталкивают и притягивают магнит, расположенный на роторе, образуя момент вращения.

Размер шага с постоянным магнитом находится в интервале от 45 до 90 градусов.
Шаговые электродвигатели с сопротивлением переменной величины
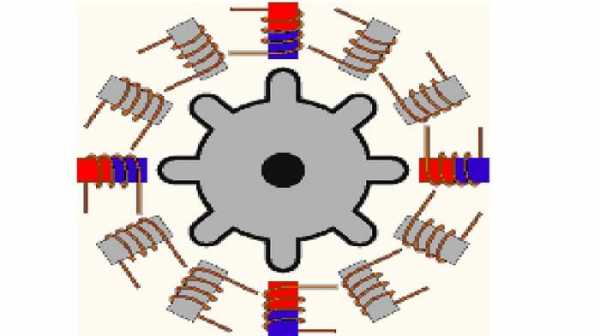
Ротор не имеет постоянных магнитов. Вместо них сердечник ротора производится из металла, похожего на диск с зубьями, или на шестерню. На статоре расположены обмотки в количестве более 4-х штук. Катушки подключаются в парах друг к другу.
Крутящий момент уменьшается, так как постоянные магниты отсутствуют. Однако, имеется положительная сторона — у шаговых моторов отсутствует момент стопорения. Стопорящий момент вращения создан постоянными магнитами, притягивающимися к корпусу статора при отключенном питании в катушках.

Можно просто определить, какой момент, если попробовать повернуть отсоединенный мотор. Сразу будут понятны ощутимые щелчки в двигателе при каждом шаге. Эти ощущения и будут являться моментом фиксации. Момент притягивает к себе магниты корпуса. На рисунке изображено действие мотора.
Шаг равен интервалу от 5 до 15 градусов.
Шаговый мотор гибридного типа
Шаговые электродвигатели называются «гибридными», потому что включают в себя разные типы характеристик. Они имеют хорошие моменты, малый размер шага, находящийся в интервале от 0,9 до 5 градусов. При этом он обеспечивает высокую точность.
Механическая конструкция вращается со значительными скоростями. Такие виды моторов применяются в станках с программным управлением, в роботах. Недостатком является высокая цена. Обыкновенный двигатель вместе с восьмью катушками.

Из-за невозможности изготовления магнита, нашли оригинальное решение. Взяли два диска с зубьями 50 штук, постоянный магнит. Приварили диски к полюсам. Получилось, что два диска имеют соответственно каждый полюс.
Оригинальность конструкции в том, что диски размещены так, что, смотря на них сверху, они похожи на один диск со 100 зубьями. Вершина зуба на одном диске совпадает со впадиной. На рисунке изображено действие гибридного мотора 75 шагов на один оборот. Шесть обмоток сделаны парами, которые имеют катушку на противоположных краях. Первая пара – это пара вверху и внизу обмотки, тогда 2-я пара смещена на угол 60+5 градусов от первой, а 3-я смещена на 65 градусов от второй.
Разница углов позволяет вращаться валу двигателя. Управляющие режимы применяются, как волновые для экономии электроэнергии.

Когда катушка задействована, имеется три положительных полюса в 5 градусов сзади, они притягиваются в сторону вращения, и три отрицательных полюса в 5 градусов впереди, толкают ротор в сторону вращения вала. Рабочая обмотка всегда расположена между отрицательным и положительным полюсами.
Схема подключения обмоток
Шаговые моторы принадлежат к моторам с несколькими фазами. Чем больше фаз, тем работа двигателя мягче, но и выше стоимость. Момент вращения не зависит от числа фаз. Большое применение получили двигатели с 2-мя фазами. Двигатели подключают тремя типами схем для 2-фазных шаговых моторов. Катушки соединены друг с другом, применено разное количество проводов для соединения двигателя с контроллером.
Биполярный двигатель
Это самая простая конструкция, применяется четыре провода для соединения мотора с контроллером. Катушки подключены параллельно или последовательно.

Параллельное или последовательное подключение
Двигатель имеет 4 контакта. Два желтых экрана подключают вертикальную катушку, два розовых – горизонтальную. Проблема в изменении полярности, можно изменить направление тока, драйвер станет сложнее.
Униполярный двигатель
Применяя общий провод, изменяют полюса магнитов. Если соединить общий провод с землей, один и другой вывод катушки к питанию, то полюса изменятся. Схема соединения двигателя биполярного типа простая для понимания, она обычно состоит из 2-х транзисторов на одну фазу.

Подключение с общим проводом
Недостаток – применение половины катушек, как при волновой управляемости электромотором. Момент вращения получается равным половине возможного значения. Униполярные электромоторы необходимо изготавливать по двойным размерам, для обеспечения сопоставимого момента. 1-полярный электромотор имеет возможность применяться в качестве биполярного мотора. Для этой цели необходимо провод отключить.
Униполярные шаговые электродвигатели имеют несколько вариантов подключения.

Общий провод соединен внутри
Шаговый мотор с 8-ю выводами
Это мотор с гибким подключением, обмотки оснащены выводами с обеих сторон. Можно подключать двигатель по любому методу:
- Униполярный с 5 или 6 выводами.
- Биполярный с последовательной схемой.
- С параллельной схемой.
- С малым током.

Подключение 4 обмоток
Шаговые электродвигатели Лавета
Моторы Лавета используются в электрических часах. Их конструкция сделана для эксплуатации с одним фазовым сигналом. Моторы Лавета обладают возможностью делать их конструкцию миниатюрной, применяются для исполнительной части часов ручного ношения. Этот тип моторов изобрел инженер Мариус Лавет . По его имени назвали тип шаговых двигателей.
Лавет – выпускник школы электрики изобрел двигатель, который дал ему известность во всем мире. Вид статора похож на статор электромотора с расщепленными полюсами. Имеется одна обмотка, полюса созданы витками с одним проводом из медной жилы толстого сечения, расположены на магнитном проводе, образуют необходимую фазу. Токи индукции образуют необходимый момент вращения.
Магнитное поле распространяется с задержкой, применяется для сдвига фаз, на прямой угол 90 градусов, чтобы имитировать напряжение из двух фаз. Конструкция ротора создана в виде постоянного магнита. Конструкции такого типа имеют широкую сферу применения в технике для быта (миксерах, блендерах). Моторы Лавета отличаются тем, что из-за зубцов вал стопорится с определенным шагом. Результатом этого возможно движение стрелки секунд. Разновидность двигателя Лавета не предназначена для реверсивной работы, как и большинство шаговых моторов.
Обзор шаговых двигателей
В мире разработчиков шаговые двигатели широко распространены в технологии 3D печати. Все потребительские 3D принтеры оснащены ими. Шаговые двигатели также широко используются и в робототехнике.
Шаговые двигатели широко используются в робототехнике и 3D принтерах
Шаговые двигатели часто сравнивают с серводвигателями, поскольку эти оба типа двигателей используются в системах, требующих высокого уровня точности позиционирования.
Однако способы, которыми каждый тип двигателя отслеживает свое положение, сильно отличаются. Как обсуждалось в предыдущей статье, серводвигатель содержит в себе потенциометр, который измеряет абсолютное положение двигателя. Поэтому в любой момент времени сервопривод точно знает, как расположен вал двигателя. Шаговый двигатель не измеряет угол своего вала.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Основные режимы
Изделие функционирует в нескольких режимах, которые предварительно настраиваются в зависимости от потребностей человека. Наиболее распространенными считаются следующие:
- Волновой режим предполагает протекание электрического тока только через одну обмотку. Сегодня он используется редко, для того чтобы снизить нагрузку на двигатель и количество потребляемой электроэнергии.
- Полношаговый — используется гораздо чаще и считается стандартным режимом для этого типа двигателя. Напряжение на обмотке при такой работе одинаково и приспособлению требует максимальное напряжение для корректного функционирования.
- Полушаговый режим — один из оригинальных способов изменить работу приспособления и при этом не затрагивать блок управления. Заключается в одновременном запитывании всех пар обмоток, что приводит к повороту ротора на половину своего обычного шага. Используя этот метод, можно получить двигатель с двойной мощностью при минимальных затратах электроэнергии. Он будет меньше изнашиваться и прослужит дольше, чем тот, что постоянно работает в полношаговом режиме.
- Микрошаговый режим сегодня считается наиболее часто применяемым при использовании шагового двигателя. Принцип действия заключается в подаче на обмотку не импульса, а сигнала, напоминающего синусоиду по форме. Такой режим делает работу двигателя более плавной, а переход от одного шага к другому незаметным. Благодаря этому уменьшаются рывки и скачки приспособления, оно может функционировать как обычный двигатель постоянного тока.
Последний режим имеет преимущество, поскольку представляет собой скорее метод подпитки двигателя, а не управления обмотками. Именно поэтому может использоваться при волновом или полношаговом способе работы приспособления. Если рассмотреть схему функционирования прибора в микрошаговом режиме, может показаться, что шаги становятся больше. На самом деле это не так, но процесс все равно становится плавным и отсутствуют рывки.
Требования
Сколько рабочих циклов в минуту нужно сделать двигателю? Какой крутящий момент нужен? Какая максимальная скорость требуется?
Эти критические вопросы не могут быть решены просто путем выбора двигателя с заданной мощностью из каталога.
Выходная мощность электрической машины представляет собой комбинацию крутящего момента и скорости, которая может быть рассчитана путем умножения скорости, крутящего момента и констант, вносящих поправки в режим работы электрической машины (естественно это все очень поверхностно. Необходимы точные математические расчеты для каждого типа электродвигателя).
Однако из-за характера этого расчета существует множество различных комбинаций крутящего момента и скорости (кратковременная работа с перегрузкой или недогрузкой), которые влияют на выходную мощность. Таким образом, разные двигатели с одинаковой номинальной мощностью могут работать по-разному из-за комбинации скорости и крутящего момента.
Инженеры должны знать, насколько быстро должен двигаться груз определенного размера, прежде чем уверенно выбирать двигатель, который будет работать лучше. Выполняемая работа также должна попадать в кривую крутящего момента / скорости двигателя. Эта кривая (механическая характеристика электродвигателя) показывает, как крутящий момент двигателя изменяется в зависимости от скорости. Используя предположения «наихудшего случая» (другими словами, определяя максимальный / минимальный крутящий момент и скорость, которые потребуются для работы), инженеры могут быть уверены, что выбранный двигатель имеет механическую характеристику, способную приводить в движение груз при этом не выходить с номинального режима работы (например, перегрев, если мощность электрической машины занижена).

Инерция нагрузки является еще одним фактором, который следует учитывать, прежде чем погрузиться в процесс принятия решения о выборе двигателя. Необходимо рассчитать коэффициент инерции, который представляет собой сравнение инерции нагрузки и инерции двигателя. Одно эмпирическое правило гласит, что если инерция нагрузки в 10 раз превышает инерцию ротора, то настройка электрический машины может быть куда более сложной и производительность производственного механизма может ухудшиться. Но это правило варьируется не только от технологии к технологии, но и от поставщика к поставщику и даже от продукта к продукту. Важность точности позиционирования рабочего органа также повлияет на это решение. Некоторые механизмы поддерживают соотношение 30: 1, в то время как прямые привода работают до 200: 1. Многим инженерам не нравится определять размер двигателя, который превышает соотношение 10 к 1.
Наконец, существуют ли физические ограничения, которые ограничивают тип электродвигателя. Электрические машины бывают разных форм и размеров. В некоторых случаях электродвигатели являются большими и громоздкими, и есть определенные операции, которые не могут вместить двигатель определенного размера. Прежде чем принять обоснованное решение о наилучшем типе машины, ее массогабаритные показатели должны быть оценены и поняты.
Как только инженеры ответят на все эти вопросы — скорость, крутящий момент, мощность, инерция нагрузки и массогабаритные показатели, — они смогут сосредоточиться на наиболее эффективном по размеру двигателе. Однако процесс принятия решений на этом не заканчивается. Инженеры также должны выяснить, какой тип электродвигателя лучше всего подходит для применения. В течение многих лет выбор типа сводился к одному из двух вариантов для большинства применений: серводвигатель или шаговый двигатель с разомкнутым контуром управления.

Эксплуатационные свойства ШД
Шаговые двигатели как компоненты, используемые в автоматизации станков, обладают рядом важных эксплуатационных свойств, к которым относятся следующие.
1. Дискретность перемещений.
Это главное свойство, определяющее все остальные параметры шагового двигателя. Львиная доля шаговых двигателей выполняет 200 или 400 шагов за один оборот ротора. Однако благодаря возможности промежуточной фиксации ротора можно добиваться увеличенного количества шагов до 800 и более. В сверхточных моделях число дискретных перемещений может достигать 10 тысяч шагов за оборот.
2. Ограничения в точности установки ротора.
Погрешность установки ротора в большинстве выпускаемых сегодня ШД составляет 5% от размера шага. Таким образом, при шаге в 1.8° неточность установки будет равняться примерно 5.4´. На практике, при дроблении шага, например, 1 к 10, шаг будет равен погрешности установки, причём, увеличение количества делений не приведёт к повышению точности перемещения. Единственное, в чём это может оказаться эффективным, – в обеспечении плавности перемещения ротора.
3. Соотношение крутящего момента и скорости вращения ротора.
С большой степенью приближения можно говорить о том, что значение произведения момента и скорости вращения вала шагового двигателя является постоянным. При возрастании скорости вращения ротора величина крутящего момента уменьшается пропорционально.
Достоинства шаговых электродвигателей
В число основных достоинств, определяющих широкое применение этого типа электрических двигателей, входят следующие.
1. Зависимость угла поворота ротора от количества импульсов, поданных на обмотку двигателя.
2. Обеспечение полного момента при остановке двигателя (при подаче питания на обмотки).
3. Повторяемость. Точность шаговых двигателей составляет от 3 до 5% величины шага, причём, ошибка от шага к шагу не накапливается.
4. Быстрый старт, мгновенная остановка, минимальное время переключения на реверс.
5. Надёжность, обусловленная отсутствием щёток. В общем случае длительность срока исправной службы двигателя зависит только от надёжности подшипников.
6. Жёсткая зависимость положения ротора от входного сигнала позволяет позиционировать ротор, не прибегая к использованию обратной связи.
7. Возможность вращения полезной нагрузки, присоединенной напрямую к валу электромотора без редуктора, с предельно малой скоростью.
8. Широкий интервал скоростей.
9. Более доступная цена в сравнении с сервоприводами.
Недостатки шаговых электродвигателей
Однако при всех положительных моментах существует и ряд недостатков, присущих шаговым электрическим моторам. Их краткий перечень:
- возникновение резонансных явлений при функционировании;
- вероятность пропуска шагов, что из-за отсутствия обратной связи приводит к невозможности контроля положения ротора;
- снижение момента и потеря стабильности при высокой скорости;
- малое значение удельной мощности.
8. Вывод
Сервопривод и шаговый двигатель не являются конкурентами, а каждый занимает свою определенную нишу. Сравним их на основе рынка станков с ЧПУ. Применение шаговых двигателей полностью оправданно для применения в недорогих станках с ЧПУ (в ценовой категории до 10—12 тыс. USD), предназначенных для обработки дерева, пластиков, ДСП, МДФ, легких металлов и других материалов средней скорости.Применение высококачественных сервоприводов необходимо в высокопроизводительном оборудовании, где главным критерием является производительность. Единственный «недостаток» хорошего сервопривода – это его высокая стоимость. К примеру, станок ATS-760 на шаговых приводах стоит 11 000 $, а эта же модель, но на сервоприводах стоит 17 500 $. Однако возможности получения высокостабильного или точного управления, широкий диапазон регулирования скорости, высокая помехоустойчивость, малые габариты и вес часто являются решающими факторами их применения. Добившись одинаковых качеств от сервопривода и шагового их стоимости станут соизмеримыми при однозначном лидерстве сервопривода.
Источник http://xn--80acehaad1bmnngri1f9eg.xn--p1ai/2017/02/14/%D1%88%D0%B0%D0%B3%D0%BE%D0%B2%D1%8B%D0%B9-%D0%B4%D0%B2%D0%B8%D0%B3%D0%B0%D1%82%D0%B5%D0%BB%D1%8C-%D0%BA%D0%B0%D0%BA-%D0%BF%D0%BE%D0%B4%D0%BA%D0%BB%D1%8E%D1%87%D0%B8%D1%82%D1%8C-%D1%83%D1%81/
Источник http://samelectrik.ru/chto-takoe-shagovyj-dvigatel-zachem-on-nuzhen-i-kak-rabotaet.html
Источник http://toyota-navi.ru/dvigatel/chto-takoe-shagovyj-dvigatel-i-zachem-on-nuzhen.html



