Постоянного тока электродвигатель

Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
Содержание
История
- г. Американский кузнец Томас Дэвенпорт создаёт первый электродвигатель постоянного тока. г. Якоби, Борис Семёнович построил лодку с электродвигателем постоянного тока.
Краткое описание коллекторного двигателя постоянного тока
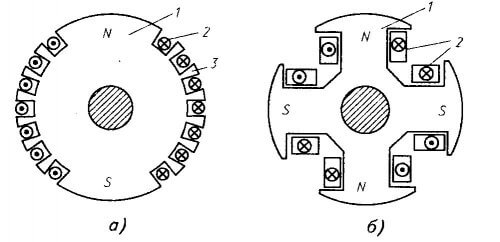
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
, где — число витков обмотки ротора, — индукция магнитного поля полюсов статора, — ток в обмотке ротора [А], — длина рабочей части витка обмотки [м], — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м], — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад], — угловая скорость [рад/сек], — время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:

, где n — число щёток, alfa — угловая ширина одной щётки [радиан].

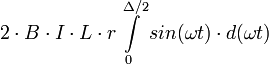
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот = ):

Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
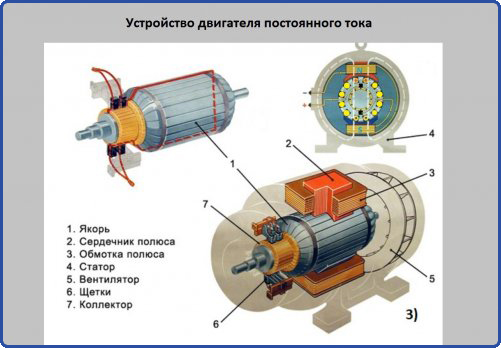
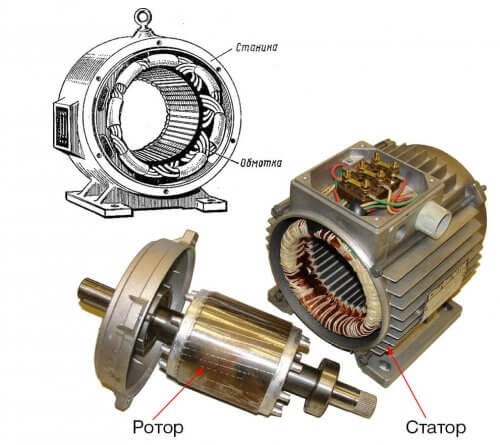
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две «мёртвые точки» из которых невозможен самозапуск двигателя.

Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным где — масса цилиндра (ротора), а — радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции — является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
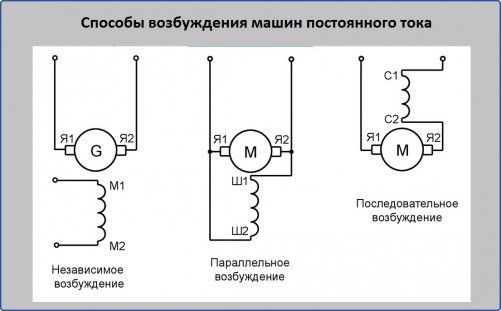
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера постоянной величины, равные

и направленные в противоположные стороны.

Эти силы прикладываются к плечам , равным
, где — радиус рамки, и создают крутящий момент , равный

.
Для двух стержней рамки суммарный крутящий момент равен
. Практически из-за того, что угловая ширина щётки [радиан] немного меньше угловой ширины зазора между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные sin(wcdot t) d(wcdot t)» width=»» height=»»/>, где , не участвуют в создании общего крутящего момента.

При числе витков в обмотке равном s крутящий момент будет равен .

Наибольший крутящий момент будет при угле поворота рамки равном , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.

Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода :


Суммарный момент обеих рамок:

Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных

, то крутящий момент для одного стержня будет равен

,
для двух стержней

,

для рамки из витков

.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные

Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :


Для второй (косинусной) рамки ,
крутящий момент от второй (косинусной) рамки будет равен

,
суммарный крутящий момент от обеих рамок равен

, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные

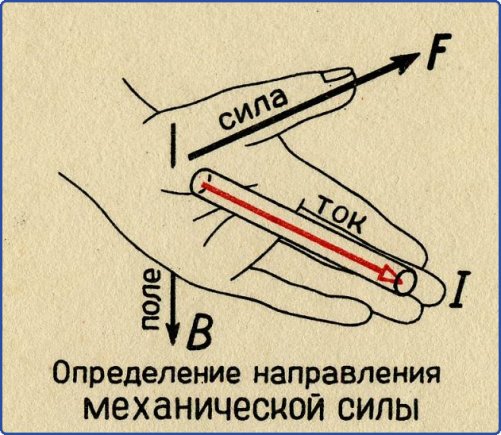
Этому феномену дал объяснение и математическое обоснование французский физик Андре-Мари Ампер. Вкратце он объясняется правилом левой руки: если открытую ладонь обратить к отрицательному полюсу магнита, так, чтобы четыре пальца показывали направление движения тока по проводнику, то большой палец укажет направление, в котором его вытолкнет магнитное поле.
Чтобы движение продолжилось, в момент совпадения полюсов должно произойти изменение их знаков. Для этого используется до гениальности простое устройство – коллектор. Он состоит из изолированных друг от друга пластин, закрепленных на валу электродвигателя. Концы кольца проводника, образующего якорную обмотку, подключены к нему неподвижно. А питающее напряжение – посредством скользящих контактов, которые изначально делали из пучка тонких проводников, поэтому их назвали щетками. В момент поворота рамки с током происходит смена полярности, и она продолжает движение, отталкиваясь от неподвижного полюса магнита. Вот зачем нужны щетки в электродвигателе постоянного тока и почему его второе название «коллекторный двигатель».
Если якорная обмотка состоит из одной рамки, то она не сможет начать вращаться, если находится на магнитной нейтрали – перпендикулярно линии электромагнитного поля. Для запуска двигателя придется приложить усилие к его валу. Для ликвидации этого эффекта используется две якорные обмотки, но общераспространенным правилом является применение минимум трех.
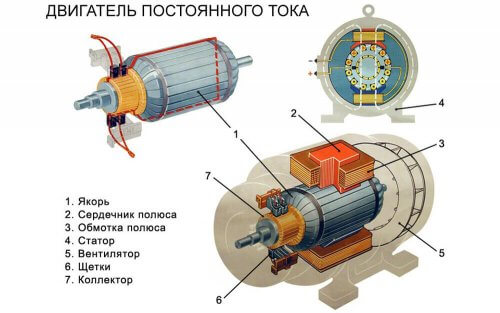
Итак, конструкция любого двигателя постоянного тока состоит из трех элементов:
- Неподвижного магнита на статоре.
- Ротора с тремя или большим числом обмоток.
- Щеточного узла, к которому подводится питающее напряжение.
Статорный магнит может быть выполнен как из ферромагнетика, так и в виде нескольких катушек, подключенных к тому же источнику электричества, что и щеточный узел. Тогда он называется обмоткой возбуждения. Для плавности хода на статоре устраивается как минимум четыре соленоида, образующих два электромагнита.
Скользящие проволочные контакты на коллекторе сначала заменили щетки угольные, а потом более прочные, сделанные из электротехнического графита. Количество коллекторных пластин зависит от способа укладки якорных обмоток, который может быть петлевым, волновым или секционным. Однако оно ограничивается диаметром коллектора и физической толщиной щетки – одновременно она не должна перекрывать более двух пластин. В противном случае уменьшается число обмоток, участвующих в коммутации – переключении полюсов, что ведет к снижению вращающего момента двигателя.
Схемы подключения и способы управления
Существует три схемы подключения двигателя постоянного тока:
- Обмотка возбуждения включена параллельно якорной. Обеспечивается высокая стабильность частоты вращения.
- Обмотка возбуждения включена последовательно с якорной. Способ позволяет регулировать вращающий момент во время пуска и получать плавную скоростную характеристику. Поэтому он используется для включения тяговых электродвигателей на транспорте.
- Обмотка возбуждения делится на две – одна включена параллельно с якорной, другая последовательно с ней.
Частота вращения двигателя постоянного тока с независимой (параллельной обмоткой) вычисляется по формуле: N = (U – Iя . Rя)/(kc . Ф). Где:
- U – величина питающего напряжения.
- Iя и Rя – ток в цепи якоря и ее сопротивление.
- kc – коэффициент качества магнитной системы.
- Ф – сила магнитного потока.
Изменить ее можно тремя способами:
- Увеличить или уменьшить величину питающего напряжения. Возможно как ускорение, так и замедление двигателя. Регулировка количества оборотов осуществляется плавно.
- Изменить сопротивление цепи якоря. Регулировка ведется дискретно, в сторону уменьшения, но не более чем до половины номинальных оборотов. Способ связан с большими энергетическими потерями.
- Изменить сопротивление цепи обмотки возбуждения. Это приводит к изменению силы магнитного потока. Чем меньше ток, тем он слабее, а частота вращения выше. Теоретически возможно торможение, но на практике, из-за насыщения магнитной системы, увеличение силы тока непропорционально велико по отношению к величине приращения силы магнитного потока. Это может привести к аварии. Однако и чрезмерное ослабление тока в обмотке возбуждения вредно – машина пойдет вразнос.
Реверсирование осуществляется изменением полярности напряжения, подаваемого на якорь.
Коллекторный двигатель переменного тока
Материал и способ исполнения обмоток коллекторного двигателя аналогичен тем, которые используются в асинхронных машинах. Поэтому его подключение к переменному току не вызывает аварии. Чтобы вращение продолжалось в одну сторону, обмотки якоря и статора включаются последовательно, тогда смена полярности полюсов магнитов происходит одновременно.
Такая конструкция широко используется в ручном инструменте, подключаемом к однофазной сети 220 вольт. Она обладает рядом преимуществ перед асинхронным двигателем:
- Нет необходимости создавать вращающееся магнитное поле, подключение в сеть происходит напрямую, без фазосдвигающих устройств.
- Поскольку магнитные поля ротора и статора вращаются синхронно, момент на валу двигателя очень высок, он устойчиво работает при переменных нагрузках.
- Просто регулировать частоту вращения.
К недостаткам коллекторного двигателя стоит отнести щеточный узел, из-за которого работа сопровождается шумом, искрением и радиопомехами.
Двигатели постоянного тока – это уникальные электрические машины, находящие применение повсеместно. Они работают в системах охлаждения компьютеров, приводят в движение электровозы, ледоколы и подводные лодки.
Какие бывают виды электрических двигателей и чем они отличаются
С этой статьи мы начинаем раздел Электродвигатели на сайте Сам Электрик, т.к. каждый электромонтер и даже домашний мастер хотя бы в общих чертах должен понимать, какие бывают виды и типы электродвигателей постоянного и переменного тока, а также особенности их устройства и применения. Материал будет построен следующим образом: мы кратко рассмотрим разновидности электрических двигателей и в чем их различия, а для более подробного изучения того или иного варианта исполнения предоставим ссылку на отдельную публикацию.
Как работают двигатели
Принцип работы всех видов электродвигателей состоит во взаимодействии магнитных полей ротора и статора. При этом магнитное поле может создаваться постоянным магнитном или обмоткой (катушка-электромагнит).
В зависимости от мощности и типа мотора обмотки могут быть расположены только на статоре или и на статоре и на роторе. Попытаемся объяснить устройство и принцип работы для чайников в электрике.
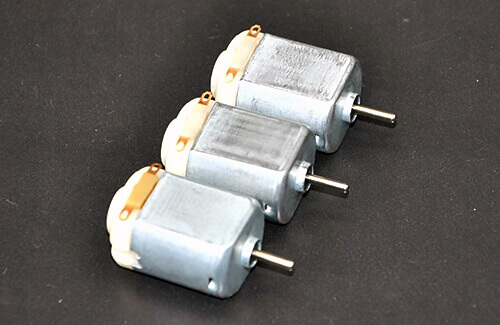
Начнем с того, что рассмотрим устройство коллекторных электродвигателей. Например, в маленьких коллекторных двигателях постоянного тока, как для радиомоделей, на статоре расположены постоянные магниты, а в роторе намотаны катушки из медного провода. Ток к катушкам ротора такого электродвигателя подаётся через щеточный узел, состоящий из щеток и коллектора. На коллекторе расположены ламели, к которым присоединены выводы обмоток.

После включения питания ротор (якорь) начинает вращаться, на нём закреплен коллектор, а неподвижные щетки касаются попеременно разных пар ламелей коллектора. Через щетки и ламели к обмоткам ротора подаётся ток то на одну обмотку, то на другую, таким образом создавая изменяющееся магнитное поле, которое взаимодействует с полем магнита. В результате полюса вращающегося и неподвижного электромагнитов притягиваются, из-за чего и происходит вращение.
Если опустить некоторые нюансы, то чем больше ток ротора, тем больше это поле и тем быстрее вращается ротор. Однако это применимо в основном для коллекторных машин постоянного и переменного токов (они универсальны).

Если говорить об асинхронном двигателе (АД) с короткозамкнутым ротором — это электродвигатель переменного тока без щеток. В нем обмотки расположены на статоре (а), а ротор представляет собой стержни (б), замкнутые на коротко кольцами — так называемая беличья клетка.
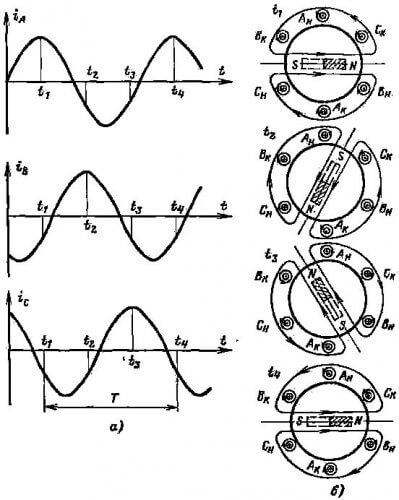
В этом случае вращающееся магнитное поле статора порождает ток в стержнях ротора, из-за которого также возникает еще одно магнитное поле. А что происходит, когда рядом расположены два магнита?
Они отталкиваются или притягиваются друг к другу. Так как ротор закреплен на концах в подшипниках, то ротор начинает вращаться. АД предназначен только для переменного тока, и скорость вращения вала у него зависит от частоты тока и числа полюсов в обмотках статора, подробнее этот вопрос мы рассмотрим в статье об асинхронных электродвигателях.
Но для начала вращения вала такого двигателя важно либо толкнуть его (придать начальную скорость), либо создать вращающееся магнитное поле. Оно создаётся с помощью расположенных определенным образом обмоток, подключенным к трёхфазной электросети (например, 380В), или с помощью пусковых и рабочих конденсаторов (в т.н. конденсаторных асинхронных двигателях).
Кроме взаимодействия магнитных полей в во вращении вала электродвигателя участвует и сила Ампера.
Поэтому нужно понимать, что момент на валу абстрактного двигателя и число оборотов зависят от конструкции и вида электромашины, а также от силы тока и его частоты. Повторюсь, что в этой статье мы не будем углубляться подробно в особенности устройства каждого из видов и типов электродвигателей, а сделаем отдельные статьи для этого.

Стоит отметить, что асинхронные и универсальные коллекторные двигатели наиболее распространены в быту и на производстве, в приводах строительных машин. Они используются везде, как для движения промышленных механизмов, так и для автомобилей, электротранспорта и используемых в бытовой технике, вплоть до электрической зубной щетки.
Основная классификация
Итак, электродвигатели главным образом делятся на машины, работающие от постоянного тока, а также от переменного тока. Чем отличается переменный ток от постоянного, мы рассказывали в статье: https://samelectrik.ru/chem-otlichaetsya-peremennyj-tok-ot-postoyannogo.html. Типы электрических двигателей рассмотрим с машин, работающих от переменки.
Двигатели переменного тока
Большинство электрических машин, используемых на производстве и в повседневной жизни, для привода лифтов, в других видах электропривода работают от переменного тока.
Двигатели переменного тока можно классифицировать следующим образом:
- асинхронные;
- синхронные.
При этом асинхронные двигатели различают либо по конструкции ротора:
- с короткозамкнутым ротором (наиболее распространены с любым числом фаз);
- с фазным ротором (только трёхфазные).
И по количеству фаз:
- однофазные (с пусковым конденсатором) используются в бытовых электровентиляторах и других маломощных устройствах;
- конденсаторные или двухфазные (это однофазные с конденсатором, который не отключается во время работы, за счет чего создаётся «вторая» фаза) используются в небольших насосах, вентиляции, на стиральных машинах типа «малютка» и старых моделей производства СССР;
- трёхфазные распространены больше всего и используются повсеместно на производстве.
Есть разные конструкции однофазных АД, в списке приведены два основных варианта!
Особенностью всех асинхронных электродвигателей является то, что частота вращения ротора немного меньше скорости вращения магнитного поля статора и равняется:

где n – число оборотов в минуту, f – частота питающей сети, p – число пар полюсов, s – скольжение, а «60» — секунд в минуте.
Таким образом частота вращения ротора определяется частотой питающей сети, конструкцией обмоток, а вернее числом пар полюсов (катушек) в ней и величиной скольжения.
Скольжение – это величина, которая характеризует насколько меньше частота вращения ротора относительно частоты вращающегося магнитного поля. При нормальных режимах работы лежит в пределах 0,01-0,06. Если говорить простым языком, то поле в статоре с одной парой полюсов вращается со скоростью:
При двух парах — 1500 об/мин, а при трёх парах — 1000 об/мин.
При скольжении, допустим, в 0,05, частота вращения ротора будет равняться:
Для регулировки оборотов таких электродвигателей используют частотные преобразователи, так как на остальные переменные, приведенной выше формулы, мы повлиять не можем.
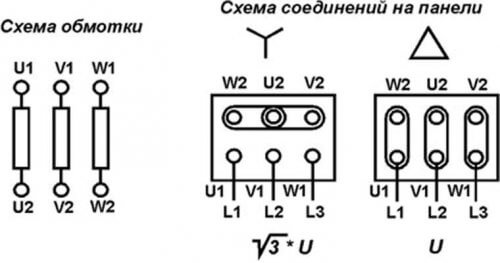
Наиболее распространены в России асинхронные двигатели с напряжением питания 220В для соединения обмоток по схеме треугольника и 380В по схеме звезды.
Если в трёхфазной электрической машине вращающееся поле статора создаётся расположением обмоток и сдвигом фаз в сети на 120˚, то в однофазных такого эффекта не наблюдается. Вал будет вращаться, если задать ему первоначальное вращение, крутнув вал рукой или установив фазосдвигающий конденсатор, который создаст сдвиг фазы на пусковой обмотке.

Двухфазные конденсаторные двигатели устроены подобным образом, но вторая обмотка не отключается после пуска, а продолжает работать через конденсатор. Поэтому название «двухфазные» скорее относится к конструкции и схеме подключения, а не к цепям питания. И двухфазные, и однофазные рассчитаны на работе от сети 220В.
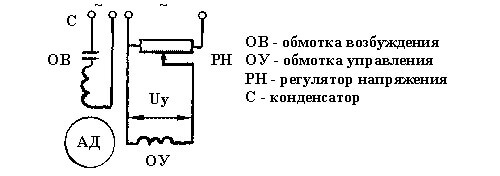
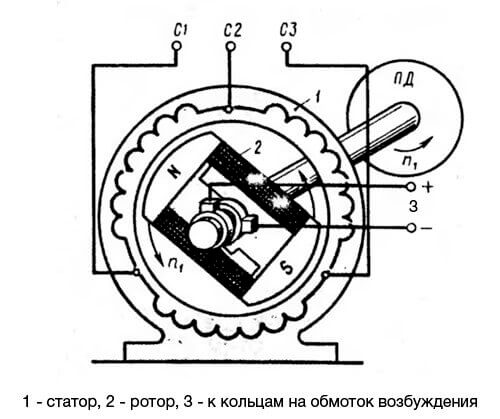
Синхронные электродвигатели (СД) почти всегда выполняются с обмоткой возбуждения на якоре, и ток возбуждения на неё передается либо через щеточный узел, либо наводится с помощью электромагнитной системы.
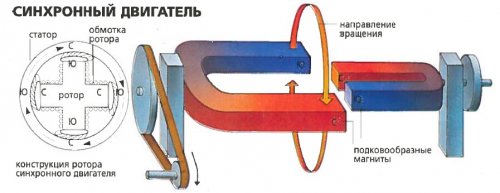
Это нужно для того, чтобы его вал вращался с частотой, совпадающей с частотой вращения поля статора. То есть такого параметра как скольжения в этом случае нет.
Ток возбуждения подаётся от специальных систем возбуждения, таких как «генератор-двигатель» или электронных преобразователей на тиристорах или транзисторах. Наиболее распространены на отечественных предприятиях такие приборы как ВТЕ, ТВУ и пр.

Не всегда есть обмотка возбуждения и щетки, например, в микроволновой печи в приводе вращения тарелки используется синхронный двигатель с постоянными магнитами.
Синхронные машины бывают явнополюсными и неявнополюсными. Визуальные отличия заключаются в конструкции ротора, на практике есть разница и в их характеристиках, методах производства и конструкции. На практике обычному домашнему электрику вряд ли с ними придётся столкнуться.
Остаётся сказать главное о двигателях переменного тока – они плохо поддаются регулировке скорости вращения из-за того, что их обороты привязаны к скорости. Уменьшение напряжения (тока) на статоре или возбуждения (у синхронных и асинхронных с фазным ротором) приводит к падению момента и увеличению величины скольжения (у АД), при этом вал может вращаться медленнее. Чтобы регулировать обороты таких двигателей, вам нужен частотный преобразователь. О том, как выбрать частотник, мы рассказали в статье: https://samelectrik.ru/vybor-chastotnogo-preobrazovatelya.html.
Двигатели постоянного тока (ДПТ)
Существуют следующие виды и типы электродвигателей постоянного тока:
- Коллекторные двигатели постоянного тока. Состоят из магнитов или катушки возбуждения и якоря, ток к обмотке якоря передаётся с помощью щеточного узла, недостатком которого является постепенный износ.
- Универсальные коллекторные двигатели. Похожи на предыдущие, но могут работать и от постоянного и от переменного тока.
- Бесколлекторный или бесщеточный. Состоит из обмоток статора, на роторе устанавливают постоянные магниты. Подключается к цепи постоянного тока через специальный контроллер, переключающий обмотки статора.
Коллекторные двигатели можно разделить на группы по типу возбуждения:
- с самовозбуждением;
- с независимым возбуждением.
По типу подключения обмоток возбуждения различают следующим образом:
- Последовательное возбуждение позволяет получить высокий момент на валу, но обороты холостого хода также очень высокие и могут повредить двигатель (пойдёт в разнос).
- Параллельное возбуждение — в этом случае обороты стабильнее и не изменяются под нагрузкой, но момент на валу меньше.
- Смешанное возбуждение совмещает достоинства обоих типов.
У маломощных коллекторных ДПТ возбуждение чаще всего организовано с помощью постоянных магнитов.

При независимом возбуждении у коллекторного электродвигателя обмотки статора и ротора не соединены друг с другом, а в сущности питаются от разных источников. Таким образом можно организовать регулировку момента или оборотов, а также добиться большей энергоэффективности.
В зависимости от конструкции такой электродвигатель может работать или только от постоянного тока, или работать от переменного и постоянного. Во втором случае их называют «универсальный коллекторный двигатель». Они широко распространены в быту, используются в кухонной технике и электроинструменте (болгарки, дрели и т.д.).

Бесколлекторные двигатели лишены недостатков, присущих коллекторным, за счет отсутствия щеточного узла. Ток подаётся к трём обмоткам статора, а обмотки переключаются с помощью контроллера. Фактически бесщеточные ДПТ питаются преобразованным переменным током. Принцип работы этих двигателей вы можете узнать, посмотрев следующее видео:
По устройству они похожи на синхронные двигатели, за исключением того, что используются постоянные магниты, а не электромагниты. Для вращения такого двигателя и повышения эффективности его работы используются датчики Холла для определения положения вала и правильного переключения обмоток.

Часто их называют вентильными двигателями, а в англоязычных источниках подобные двигатели, в зависимости от конструкции, называют PWSM или BLDC.

Они используются в компьютерных кулерах, в качестве привода для радиоуправляемых моделей, таких как квадрокоптеры, а также в моторколесе для велосипеда.
Дополнительная классификация
Кроме рассмотренных выше двигателей следует сказать о других видах, таких как:
- шаговые;
- сервоприводы;
- линейные;
- двигатели пульсирующего тока (похож на двигатель постоянного тока, отличием является то, что питание осуществляется выпрямленным пульсирующим током).
Шаговые двигатели и сервоприводы используются там, где нужно позиционировать узел какого-то механизма. Простейший пример – ЧПУ, 3D-принтер и прочее. Также с помощью «шаговиков» иногда управляют положением дроссельной заслонки автомобиля – и это лишь малая часть их применения.
Описание функций и особенностей этих видов электропривода – это тема для отдельной статьи. Если вам интересно, пишите комментарии и мы её опубликуем!
Линейный двигатель, в отличии от всех выше перечисленных, движение его вала не вращательное, а поступательное. То есть он не крутится, а двигается «вперед-назад». Они бывают разными:
- переменного тока по принципу действия похожие на синхронные и асинхронные электродвигатели;
- постоянного тока;
- пьезоэлектрические;
- магнитострикционные.
На практике встречаются редко, используются в качестве привода для монорельсовой железной дороги, для подачи рабочего органа в различных станках.
Однако приведенная в статье классификация была выбрана с точки зрения практичности, в литературе же предлагают разделять электропривод по следующим критериям.
По специфике создающегося вращательного момента:
- гистерезисные;
- магнитоэлектрические.
Следующий вариант классификации основан на различиях конструкции и особенности их конструктивного исполнения.
По типу и расположению вала:
- с горизонтальным расположением вала;
- с вертикальным размещением вала.
Защите от действий внешней среды:
- защищённые от повышенной влажности и пыли;
- для эксплуатации во взрывоопасных помещениях.
По продолжительности режима работы:
- повторно-кратковременный (лебедки, краны, двигатели задвижек);
- для продолжительного режима работы (насосы, вентиляция и т.д.).
По мощности также можно различать машины малой, средней, большой мощности. Однако пределы этих мощностей приводить не имеет смысла, поскольку где-то 6 МВт – это средняя мощность, а где-то 1 кВт – это колоссальное число.
Подробно рассмотреть все виды в пределах одной статьи невозможно, поэтому мы рассмотрим каждый вариант исполнения по отдельности. Надеемся, предоставленная вкратце классификация помогла вам понять, какие бывают типы электродвигателей постоянного и переменного тока, а также в чем их различия и особенности применения!
Источник http://dic.academic.ru/dic.nsf/ruwiki/1103153/%D0%9F%D0%BE%D1%81%D1%82%D0%BE%D1%8F%D0%BD%D0%BD%D0%BE%D0%B3%D0%BE
Источник http://electriktop.ru/oborudovanie/elektrodvigatel-postoyannogo-toka.html
Источник http://samelectrik.ru/vidy-elektricheskix-dvigatelej-i-ix-razlichiya.html



