Принцип работы двигателя постоянного тока
На статоре находится индукторная обмотка (обмотка возбуждения), на которую подаётся постоянный ток — в результате создаётся постоянное магнитное поле (поле возбуждения). В двигателях с постоянными магнитами поле возбуждения создаётся постоянными магнитами.
В обмотку ротора (якорная обмотка) также подаётся постоянный ток, на который со стороны магнитного поля статора действует сила Ампера — создаётся вращающий момент, который поворачивает ротор на 90 электрических градусов, после чего щёточно-коллекторный узел коммутирует обмотки ротора – вращение продолжается.
По способу возбуждения двигатели постоянного тока делятся на четыре группы:
- С независимым возбуждением — обмотка возбуждения питается от независимого источника
- С параллельным возбуждением — обмотка возбуждения включается параллельно источнику питания обмотки якоря
- С последовательным возбуждением — обмотка возбуждения включена последовательно с обмоткой якоря
- Со смешанным возбуждением — у двигателя есть две обмотки: параллельная и последовательная.
Пуск двигателя постоянного тока
При прямом пуске ток якоря может на порядок превышать номинальный, поэтому при пуске в цепь якоря вводится пусковое сопротивление пусковой реостат. Для плавного пуска реостат делают ступенчатым — в первый момент включаются все ступени (максимальное сопротивление), по мере разгона двигателя растёт противо-ЭДС, ток якоря уменьшается — ступени выключаются одна за другой.
Регулирование скорости вращения двигателя постоянного тока
- Скорость ниже номинальной регулируется напряжением на якоре (мощность при этом пропорциональна скорости, момент неизменен)
- Скорость выше номинальной регулируется током обмотки возбуждения — чем слабее поле возбуждения, тем выше скорость (момент падает при постоянной мощности)
Регулирование питания якоря и обмотки возбуждения осуществляется с помощью тиристорных преобразователей (приводов постоянного тока).
Преимущества и недостатки двигателей постоянного тока
Преимущества:
- Практически линейные характеристики двигателя:
- механическая характеристика (зависимость частоты от момента)
- регулировочная характеристика (зависимость частоты от напряжения якоря)
Недостатки:
- Дополнительные расходы на профилактическое обслуживание коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
- Дороже асинхронных двигателей.
Как выбрать
Выбор двигателя постоянного тока
- Высота оси
- Номинальное напряжение якоря
- Номинальное напряжение возбуждения
- Номинальная частота вращения
- Номинальная мощность
- Номинальный момент
- Номинальный ток якоря
- Мощность возбуждения
- Максимальная частота вращения при понижении поля (выше этой скорости падает мощность)
- Предельно допустимая рабочая скорость (выше этой скорости начинается механическое разрушение)
- КПД
- Момент инерции
- Степень защиты IP
- Степень виброустойчивости (прессы и т.п.)
- Класс изоляции (для работы от преобразователя не ниже F)
- Температура окружающей среды (для работы при отрицательных температурах в условиях русской зимы требуется специальное исполнение: смазка, вал из специальной стали и т.п.)
- Высота установки над уровнем моря (выше 1000 метров падают характеристики)
- Конструктивное исполнение по способу монтажа электродвигателей
- Маслоуплотнённый фланец для присоединения редуктора
- Конвекционное: воздушный фильтр, контроль расхода воздуха, встроенный (направление обдува) или внешний (подключение труб) вентилятор
- Через теплообменник
- Качения (радиально-упорные)
- Усиленные подшипники для повышенных радиальных нагрузок на валу
- С пополнением смазки
- Для подключения редуктора
- Со шпоночным пазом
- Окошко для визуального контроля
- Микропереключатель ограничения остаточной длины щёток
- Термисторная защита – контроль граничных значений (предупреждение, отключение)
- Непрерывный контроль температуры при помощи датчика KTY
Выбор преобразователя постоянного тока
- Режим работы:
- Одноквадрантный (1Q) — нереверсивный
- Четырёхквадрантный (4Q) — реверсивный.
- Вентилятора
- Блока управления (электроники)
- Возбуждения

© Туманов А.В. 2016-2017
Принцип действия электродвигателя постоянного тока
Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач. Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье.
Как работает двигатель постоянного тока

Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Принцип действия современных электродвигателей

Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.

Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
Двигатель постоянного тока работа
Двигатели постоянного тока (ДПТ), используются для превращения энергии постоянного тока в механическую работу. ДПТ был первой из всех изобретенных вращающихся электромашин. Принцип его действия известен с середины прошлого столетия, и до настоящего времени ДПТ продолжают верно служить человеку, приводя в движение огромное количество машин и механизмов.


Двигатель постоянного тока — историческая справка
В 1821 году Фарадей, проводя эксперименты при взаимодействии проводников с током и магнитом, увидел, что электрический ток вызывает вращение проводника вокруг магнита. Таким образм, опыт Фарадея подготовил почву для создания электрического двигателя. Немногим позже, Томас Дэвенпортв 1833 году изготовил первый роторный электродвигатель постоянного тока, и реализовал его при движении модель поезда. Годом позже, Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором был использован принцип непосредственного вращения подвижной части двигателя. А уже 13 сентября 1838 г в Российской империи первая моторная лодка с 12 пассажирами поплыла по Неве против течения. Колеса с лопостями приводились во вращение электрическим двигателем, который получал ток от батареи из 320 элементов.
В 1886 году электродвигатель постоянного тока стал похож на современные варианты. В дальнейшем он всё более и более модернизировался.
Сегодня жизнь нашей техноргенной цивиализации совершенно невозможна без электродвигателя. Он используется практически везде: в поездах, троллейбусах, трамваях. На заводах и фабриках используются мощные электрические станки, приборы бытовой техники (Электромясорубки, кухонные комбайны, кофемолки, пылесосы) и т.п
Двигатель постоянного тока принцип работы
Подавляющее большинство электродвигателей работает в соответствии с физикой магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней электрический ток, то ее начнет выдавливать наружу.Т.к когда ток течет по проводнику. он формирует вокруг себя кмагнитное поле по всей длине проводника. Направление этого поля можно узнать по правилу буравчика.
При взаимодействии кругового магнитного поля проводника и однородного поля магнита, между полюсами поле с одной стороны уменьшается, а с другой увеличивается. То есть среда результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, в соответствии с правилом левой руки. а величина вычисляется по формуле
где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода
В электродвигателях постоянного тока малой мощности для создания постоянного магнитного поля используются типовые постоянные магниты. В случае средней и большой мощности однородное магнитное поле генерируют с помощью обмотки возбуждения.
Рассмотрим процесс получения механического движения с помощью электричества более подробно. В однородном магнитном поле вертикально разместим проволочную рамку и подключим ее к источнику тока. Рамка начнет проворачивается и достигает горизонтального положения. Которое считается нейтральным, т.к в нем воздействие поля на проводник с током равно нулю. Чтобы движение не останавливалось, нужно поместить ещё хотя бы одну рамку с током и обеспечить переключение направления движения тока в необходимый момент.

Типичный двигатель вместо одной рамки имеет якорь с множеством проводников, уложенных в специальные пазы, а вместо постоянного магнита — статор с обмоткой возбуждения с двумя и более полюсами. На рисунке чуть выше показан двухполюсный электромотор в разрезе. Если по проводам верхней части якоря пропустить ток движущийся «от нас», а в нижней части — «на нас», то в соответствии с правилом левой руки верхние проводники будут выдавливаться из магнитного поля статора влево, а нижней части якоря — выталкиваться вправо. Т.к медный провод размещен в специальных в пазах якоря, то, вся сила будет переходить и на него, и он будет крутиться. Поэтому, когда проводник с направлением тока «от нас» окажется внизу и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и начнется торможение. Чтобы этого избежать требуется поменять направление тока на обратное, в тот момент когда будет пройдена нейтральная линия. Это осуществляется с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с схемой.
Итак, обмотка якоря передает вращающий момент на вал движка постоянного тока, а тот приводит в движение рабочие механизмы. Конструктивно все двигатели состоят из индуктора и якоря, разделенных воздушным промежутком.

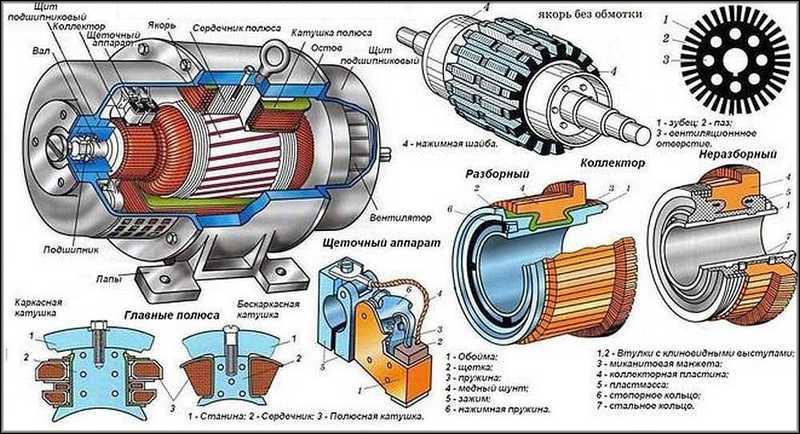
Статор электродвигателя служит для создания неподвижного магнитного поля и состоит из станины, главных и добавочных полюсов. Станина предназначена для крепления основных и добавочных полюсов и служит элементом магнитной цепи. На главных полюсах имеются обмотки возбуждения, используемые для создания магнитного поля, на добавочных полюсах расположена специальная обмотка, используемая для улучшения условий коммутации.

Якорь ЭД постоянного тока состоит из магнитной системы, сделанной из отдельных листов, рабочей обмотки, уложенной в специальные пазы, и коллектора для подвода к рабочей обмотке питания.
Коллектор похож на цилиндр, насаженный на вал ЭД и сделанный из изолированных друг от друга медных пластин. На коллекторе находятся специальные выступы-петушки, к которым припаяны концы секций обмотки. Съем тока с коллектора происходит с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки находятся в щеткодержателях, которые удерживают их в определенном положении и создают требуемое нажатие на поверхность коллектора. Щетки и щеткодержатели крепятся на траверсе и связанны с корпусом.

Коллектор сложный, дорогой и самый ненадежный узел ЭД. Он часто искрит, создает помехи, забивается пылью от щеток. А при большой нагрузке может все закоротить наглухо. Его главная задача переключать напряжение якоря туда сюда.
Чтобы лучше понять работу коллектора сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда рамка займет положение, А, в ее проводниках будет индуктироваться максимальный по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним.
Индуктированный ток из проводника В, соединенного с пластиной 2, следует на щетку 4 и, проходя внешнюю цепь, через щетку 3 возвращается в проводник А. При этом правая щетка будет положительной, а левая отрицательной.
Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку.
Поэтому, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, направление тока во внешней цепи не изменилось.
В следующий момент (Г), рамка вторично займет положение на нейтральной линии, в проводниках и, во внешней цепи тока опять не будет.
В последующие временные интервалы рассмотренный цикл движений будет повторяться в той же последовательности, т.о, направление тока во внешней цепи благодаря коллектору все время будет оставаться постоянным, а вместе с этим сохраняеться и полярность щеток.
Щеточный узел используется для подвода питания к катушкам на вращающемся роторе и переключения тока в обмотках. Щетка это неподвижный контакт. Они с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Для уменьшения искрения последних используют различные способы, основным из которых является использование добавочных полюсов.

С ростом разгона начинается следующий процесс, обмотка якоря двигаясь поперек магнитного поля статора и наводит в нем ЭДС. но направлена она встречно той, что вращает ЭД. И в результате, ток через якорь резко уменьшается и тем сильнее, чем больше скорость.
Схемы включения двигателя. При параллельном соединении обмоток, обмотка якоря изготавливается из большого количества витков тонкой проволоки. Тогда коммутируемый коллектором ток будет ниже и пластины не будут сильно искрить. Если выполнить последовательное соединение обмоток статора и якоря, то обмотка индуктора выполняется проводником большего диаметра с меньшим количеством витков. Поэтому, намагничивающая сила остаётся постоянной, а характеристики ЭД увеличиваются.
Недостатками ЭД постоянного тока можно считать быстрый износ щеточно-коллекторного узла. Достоинства – хорошие характеристики запуска, простая регулировка частоты и направления вращения.

Обмотка возбуждения двигателя постоянного тока
Наличие обмотки возбуждения у двигателя постоянного тока дает возможность реализовывать различные схемы подключения. В зависимости от того каким образом соединена обмотка возбуждения (ОВ), бывают двигатели постоянного тока с независимым возбуждением, и с самовозбуждением, которое, в свою очередь разделяется на последовательное, параллельное и смешанное.
Пуск двигателя постоянного тока
Пуск двигателей постоянного тока осложнен возникающими в момент старта огромными значениями моментов и пусковых токов. В ДПТ пусковые токи могут превышать номинальные в 10-40 раз. Такое сильное превышение может легко сжечь обмотки. Поэтому токи при пуске стараются ограничить до уровня (1,5-2) Iн
Асинхронный двигатель. Устройство и принцип работы
Работа асинхронного двигателя основана на принципах физического взаимодействия магнитного поля, появляющегося в статоре, с током, который это же поле генерирует в роторной обмотке.
Cинхронный двигатель. Принцип работы
Синхронный двигатель – это разновидность электродвигателей, только работающих от переменного напряжения, при этом частота вращения ротора совпадает с частотой вращения магнитного поля. Именно поэтому она остается постоянной вне зависимости от нагрузки, т.к ротор синхронного двигателя – это обычный электромагнит и его, количество пар полюсов совпадает с числом пар полюсов у вращающегося магнитного поля. Поэтому взаимодействие этих полюсов обеспечивает постоянство угловой скорости, с которой крутится ротор.
Схемы управление электродвигателями
Электродвигатели устройства для преобразования электрической энергии в механическую и наоборот, но это уже генераторы. Существует огромное разнобразие типов электромоторов, поэтому и схем управления электродвигателями существует великое множество. Рассмотрим некоторые из них
Двигатели постоянного и переменного тока
Электромеханическое устройство, которое за счет преобразования электрической энергии приводит в движение механизмы, подключенные к нему, называется электродвигателем. В зависимости от вида потребляемой энергии они подразделяются на машины постоянного и переменного тока.

Их преимущества все более вытесняют двигатели на других источниках энергии из большинства конструкций производственных и бытовых механизмов. В автомобилях массовая замена ДВС на электропривод начинается на наших глазах.
Постоянный ток
Электрический ток (направленное движение заряженных частиц), не изменяющийся по направлению и амплитуде, называется постоянным. Источники его изначально были химические процессы, а сейчас возобновляемые (солнце, ветер). Преобразование его технически сложно, поэтому на большие расстояния передавать такой ток довольно дорого.
На малых расстояниях у него есть преимущества: отсутствие реактивной мощности и малые потери в проводах за счет прохождения по всему сечению проводника. Двигатели постоянного тока устанавливаются рядом с источниками и преобразователями, чтобы иметь возможность менять величину и направления тока в соответствии с потребностями в моменте и скорости исполнительного механизма.
Принцип действия
Школьный опыт с демонстрацией вращения рамки в магнитном поле отрытый в 1821 Фарадеем поясняет работу двигателя постоянного тока. Металлическая рамка с проходящим через нее током от батареи повернется под действием магнитного поля так, чтобы его воздействие стало нулевым. Для получения непрерывного вращения необходимо в этот момент поменять направление тока, либо объединить несколько рамок в процессе.

Виды двигателей постоянного тока
К концу 19 века уже началась эксплуатация электрических машин постоянного тока: генераторов и моторов. Причем оба вида не отличаются конструктивно и могли применяться как для выработки электроэнергии, так и для производства работ.
Коллекторный мотор
Принцип вращения рамки с током в поле постоянного магнита наиболее ярко реализован в коллекторных электродвигателях. Такие электродвигатели работают как от постоянного, так и от переменного тока. Впервые судно с двигателем постоянного тока запустил Б.С. Якоби по реке Неве в 1838г.
Такой двигатель состоит из неподвижной части (статор), на которой устанавливаются магниты для маломощных двигателей или катушки из ферримагнитных сталей, и обмотки с медным проводом для мощных электрических машин.
Якорь МПТ собран из пластин электротехнической стали, изолированных от вала и друг от друга для уменьшения вихревых токов. В пазы цилиндра укладывается витки провода из меди разного сечения в зависимости от токов и выбранной схемы (петлевая, волновая). Концы проводов выводятся и ввариваются (впаиваются) в ламели коллектора.
Коллектор состоит из медных изолированных пластин (ламелей) закрепленных по окружности, изолированных друг от друга и корпуса якоря. По ним перемещаются притертые подпружиненные щетки, закрепленные в щеткодержателе, для последовательной подачи тока в обмотки якоря. При подаче напряжения на щетки, якорь начинает вращаться и двигатель постоянного тока выходит в заданный режим.
Универсальный коллекторный мотор
Дальнейшее развитие коллекторных ДПТ позволило использовать их при работе от источников переменного тока. Для этого шихтуется не только якорь, но и цилиндр статора набирается из пластин электротехнической стали, а обмотки возбуждения соединяются последовательно с якорными. Одновременная смена полярности на них при прохождении переменного тока не меняет направление вращения вала двигателей.

Основное отличие — шихтованные статор и якорь делают магнитный поток стабильным и не создают вихревых токов (меньше греются). В остальном универсальный двигатель мало чем отличается от обычного коллекторного.
Вентильно-индукторные двигатели
Такие электромоторы иногда называются бесщёточными или безколлекторными. Суть такой конструкции в том, что ротор имеет зубчатое строение, собранное из постоянных магнитов, а обмотки возбуждения размещаются на зубчатых полюсах статора.

Переключением полюсов (катушек) занимается встроенный контроллер, за обратную связь, контролирующую положение якоря (ротора), отвечает датчик Холла. При включении пары катушек магнит на роторе движется к ней, затем следующая пара получает питание. Скорость вращения определяется частотой переключения катушек — чем выше частота, тем выше скорость.
Недостатком такой конструкции является пульсирующий крутящий момент. Плюсы: нет коллектора и щеток, простая конструкция, хорошее управление скоростью и малые габариты.
Безколлекторный с независимым возбуждением
Конструкция ротора этого двигателя собрана из двух зубчатых пакетов из магнитной стали на общей оси. Вершины зубцов пакета смещены друг относительно друга на 120°. Пакеты отстоят друг от друга на расстоянии, а зубцы одного совпадают с впадинами другого, таким образом, что суммарный магнитный поток ротора равен нулю.
Размещенная на статоре обмотка возбуждения тоже распределена со смещением в 120°. Собранный из электротехнической стали статор имеет размер такой, чтобы его магнитное поле перекрывало оба пакета магнитов ротора.

Поочередное включение катушек ротора создает магнитное поле в обоих магнитных блоках и ротор начинает плавно вращаться. Изменяя частоту и направление переключения секций обмотки возбуждения, а также силу тока в них, можно получить бесконтактный реверс, линейный крутящий момент и плавное изменение скорости.
Кроме этих достоинств есть еще отсутствие магнитов и графитовых щеток с коллектором. К недостаткам можно отнести сложность конструкции двигателей и питание обмоток от электронного преобразователя.
Несомненными достоинствами двигателей постоянного тока можно отнести:
- уровень плавного регулирования скорости достигает 10000 об/мин;
- легкость управления скоростью за счет напряжения, а крутящего момента — током якоря;
- за счет обратной связи можно поддерживать хороший момент на малых оборотах.
Их недостатков можно отметить обязательное наличие преобразователя переменного тока в постоянный и сложность конструкции некоторых видов двигателей (коллектор со щетками, сложный якорь).
Переменный ток
Основных недостатков переменного тока два: наличие потерь мощности за счет обменных процессов между индуктивностями и емкостями в сетях (реактивной мощности); вытеснение переменного тока в проводнике от центра к поверхности. Чем выше частота, тем меньше используется сечение провода.
Изменение напряжения решается легко при помощи трансформаторов, потери в котором составляют не более 1% передаваемой мощности. Трансформаторы решают легко две задачи: гальванической развязки цепей высокого и низкого напряжения; за счет высокого напряжения при передаче электроэнергии на большие расстояния снижаются потери в проводах.
Создание трехфазных сетей переменного тока, кроме повышения эффективности электроснабжения, привело к появлению двигателей переменного тока, так как они получили вращающееся магнитное поле напрямую из сети без преобразователей.
Виды двигателей переменного тока
Применение трехфазных электросетей привело к доминированию асинхронных двигателей переменного тока во всех отраслях промышленности.
Принцип действия
В статоре асинхронного двигателя укладывается трехфазная обмотка, которая при прохождении синусоидального тока создает вращающееся магнитное поле. При пересечении замкнутых проводников ротора магнитное поле создает электрический ток (возникает ЭДС).

Переменный ток в проводнике создает свое магнитное поле, которое стремится догнать поле статора. Взаимодействие полей заставляет вращаться ротор, скорость вращения которого отстает от скорости вращения поля статора на величину скольжения. Наличие этой разности главное условия вращения ротора асинхронного мотора.
Асинхронный трехфазный двигатель
Двигатели, использующие трехфазную электрическую сеть для создания статором вращающегося магнитного поля. По конструктивному исполнению ротора они делятся на короткозамкнутые и фазные.
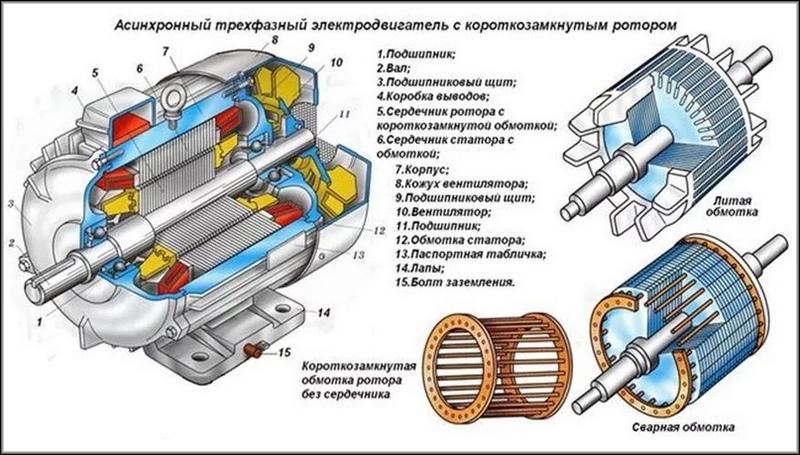
Для короткозамкнутого ротора — в пазы собранного из листов электротехнической стали цилиндра заливается алюминий (реже медь) и по торцам соединяются токопроводящими кольцами. В этой «беличьей» клетке образуется ЭДС, затем ток и магнитное поле для вращения вала. Последние конструкции таких двигателей используют цельно металлический полый алюминиевый ротор.

В фазных моторах трехфазная обмотка, соединенная «звездой», укладывается в пазы ротора и свободные концы выводятся на контактные кольца для подключения сети или резисторов для снижения пускового тока
Однофазный асинхронный мотор не может создать вращающееся магнитное поле, способное заставить ротор вращаться. Для того чтобы сдвинуть ротор, на статоре укладывается две обмотки: пусковая и рабочая. Во время пуска напряжение подается на рабочую и, на короткое время через конденсатор, на пусковую катушку. Созданный таким образом перекос фаз заставляет вращаться ротор, пусковая обмотка отключается, а двигатель входит в номинальный режим.
Синхронные двигатели переменного тока
У синхронных машин в номинальном режиме скорость вращения ротора равна скорости вращающегося поля статора. Отличающийся от асинхронного наличием коллектора.
На статоре такого электромотора размещается трехфазная обмотка (на больших машинах чаще всего высоковольтная), создающая вращающееся магнитное поле. На роторе укладывается две обмотки: «беличья клетка» и электромагнитные катушки с питанием от источника постоянного тока.

Пуск синхронного двигателя происходит, как и у асинхронного короткозамкнутого. По достижении номинальной скорости асинхронного режима подается питание на электромагниты, а скорости вращения магнитного поля статора и ротора уравниваются.
К положительным качествам синхронных машин можно отнести:
- небольшую реактивную мощность и. как следствие, высокий КПД и соs φ;
- в большом диапазоне постоянная скорость при переменной нагрузке;
- устойчивость к перегрузкам.
Из недостатков: наличие источника постоянного тока, сложность пуска, трудности в регулировании момента и скорости вращения.
Выбор электродвигателей
На описании принципов работы, устройства и краткого изложения характеристик однозначный выбор в пользу того или иного решения можно сделать только в самых простейших случаях. Современные электрические машины становятся все более универсальными. Какая разница есть между двигателем и генератором, в чем различие машин постоянного и переменного тока на первый взгляд не всегда возможно понять.
Развитие электронной промышленности размывает границы ниш. Теперь и двигатели постоянного тока, и двигатели переменного тока теряют свои позиции. Появление частотного регулирования скорости и момента асинхронных короткозамкнутых и синхронных двигателей все сильнее смещает принятие решения из инженерной сферы в технико-экономическую.
Электрические машины выбирают на основе следующих критериев:
- стоимость двигателя, силового преобразователя и программного обеспечения к нему;
- издержки на обслуживание и эксплуатационные расходы;
- надежное решение технологических задач в производстве;
- габаритные размеры и необходимую площадь.
Это только начало. В крупных проектах придется учитывать воздействие на окружающую среду, штрафы на искажение сетевой частоты и так далее. Чтобы принять оптимальное решение в конкретном случае — какой электродвигатель и с каким приводом применять — придется оценить совокупность множества условий.
Электродвигатели постоянного тока

Несмотря на широкое распространение сетей переменного тока как с тремя фазами, так и однофазных, электрические сети постоянного тока (пт) давно существуют и развиваются, совершенствуясь. Наиболее старые электросети пт обслуживают электротранспорт. Двигатель постоянного тока (в сокращении дпт) — наиболее распространенный мотор на городском электрическом транспорте. При постоянном токе индуктивность и емкость почти не оказывают влияние на протекающие процессы, и по этой причине не только электротранспорт, но и многие другие системы, потребляющие электрическую энергию, работают намного эффективнее.
Далее в статье мы расскажем о дпт, включая:
- принцип действия двигателя постоянного тока;
- устройство оборудования;
- преимущества и недостатки.

Что положено в основу
Вскоре после того как было обнаружено взаимодействие магнита и проводника с электрическим током, исследователи догадались усилить электромагнитное поле, создаваемое проводником, придав последнему специальную форму. Так появился виток и рамка как разновидность витка. Рамка в поле постоянного магнита обнаружила свойство стремиться занимать только одно положение. Она всегда устанавливается своей плоскостью поперек силовых линий магнита. Если рамка может вращаться на оси, то при наличии тока она будет поворачиваться вокруг этой оси до тех пор, пока не станет поперек силовых линий магнита.

В процессе поворота ток в рамке должен течь непрерывно. До недавних пор, пока не появились полупроводниковые приборы достаточной мощности, единственным решением этого были скользящие контакты — щетки. Они скользят по контактам рамки, которые в виде пластин размещаются на поверхности цилиндра, расположенного коаксиально с рамкой. Коллектор — так называется этот цилиндр с контактами. Чтобы получить непрерывное вращение несколько рамок, и коллектор располагают на общей оси. Тогда станет возможно преодолеть устойчивое состояние каждой рамки в ее крайнем положении.
Когда рамок становится достаточно много, коллекторная сборка контактов получается все более многочисленной, а контакты узкими, в результате чего количество их увеличивается на 2 с каждой новой рамкой. Посчитав количество пластин и разделив полученное число на 2, можно узнать количество рамок в конструкциях движков. Чтобы взаимодействие рамки с магнитом в электродвигателях получалось наиболее эффективным, все внутреннее пространство заполняется металлом — ферромагнетиком. Таким способом получаются роторы, которыми снабжены электродвигатели постоянного тока.
Конструкция и технические возможности
В цилиндре делаются пазы, в нее укладываются провода в виде рамки, и коллектор присоединяют к пластинам. Так делается большинство роторов дпт. Поскольку щетки присоединяются к источнику питания, и только они вместе с коллектором определяют работу движка и состоят в связи с электросетью, ротор дпт — это якорь. В этом и есть отличие якоря электродвигателей пт. Якорю в асинхронном и синхронном моторах присуще быть статором.

Изображение конструкции ротора электромотора, показанное выше, наглядно дает понимание того, как работает двигатель постоянного тока. Щетки подают на пластины коллектора постоянное напряжение. Обмотка на сердечнике — это своего рода соленоид. На постоянном токе сердечник соленоида намагничивается и обретает полюса. В результате устройство электродвигателя — это, по сути, взаимодействующие постоянные магниты. Эти принципы взаимодействия хорошо известны всем. И наверняка каждый человек, державший в руках два магнита, помнит, что одноименные полюса их отталкиваются, а разноименные — притягиваются.

По такому же принципу работают все электрические машины, выполняющие функции электромоторов. Как на переменном, так и на постоянном токе. Электрический двигатель постоянного тока имеет щеточный коллекторный узел. Он в определенный момент отключает от источника питания одну обмотку-рамку и питает током следующую. В результате такого устройства полюсы соленоида смещаются. А основанное на принципе взаимодействия постоянных магнитов вращение ротора продолжается.
Принцип действия электродвигателя постоянного тока не предусматривает обязательное применение постоянных магнитов в статоре. В большинстве мощных коллекторных движков по причине дороговизны постоянных магнитов конструкцию статора делают на основе электромагнита. Это не только дешевле. Такая конструкция совместно с использованием щеточно-коллекторного узла в моторе и работающая на тех же принципах, что и движки с постоянными магнитами, позволяет совместить в одном устройстве способность работать как на постоянном, так и на переменном напряжении.
Если в статоре применен постоянный магнит, направление тока в рамке, которое определено полярностью щеток, будет обуславливать вращение вала (рамки) в ту или противоположную сторону. Двигатель постоянного тока с электромагнитным статором называют также универсальным электродвигателем. Обмотку статора и щетки можно в нем соединять либо последовательно, либо параллельно. В любом из этих соединений принцип работы электродвигателя пт обеспечит однонаправленное вращение вала при подключении к переменному напряжению.
Преимущества и недостатки
Одновременная смена полярности в статоре и роторе обеспечит электродвигателю одно и то же направление силы Лоренца в течение всего времени воздействия переменного напряжения. Это расширяет полезные свойства двигателя, работающего на пт. Однако на постоянном токе сердечники дпт могут работать в режиме насыщения, обеспечивая при взаимодействии ротора и статора максимальную силу.
- В этом заключается главное преимущество дпт. На переменном напряжении индуктивность ротора и статора не позволит получить нормальный режим работы с аналогичными по силе магнитными полями.
А вот недостаток дпт по сути только один — это коллектор. Самое худшее в электротехнике — это контакты. Большинство проблем и неисправностей обусловлено именно этими деталями. А коллектор — это и есть контакты, много контактов. Причем колектору присущи следующие недостатки:
- Коммутация индуктивной нагрузки, которой является каждая рамка. В результате на щетках появляется искрение, которое при определенных условиях (оборотах и мощности) развивается в круговой огонь на коллекторе. Это недопустимо опасный режим, который быстро портит дпт.


- Истирание щеток создает угольную пыль, которая проникает повсюду и увеличивает вероятность замыканий и неисправностей.
- Щетки ограничивают рабочий ресурс дпт и должны регулярно проверяться и заменяться.

Устранить недостатки дпт путем изменения его конструкции стало возможным только с появлением полупроводниковых ключей, запираемых при пт. Но при этом получается новый тип двигателя, который часто именуется шаговым. Применение электромагнитов в роторе и статоре все равно не избавляет от контактов. Для питания рамок ротора нужны те же щетки, но уже не коллектор, а кольца. Полупроводниковый коммутатор в цепи каждой рамки подключает ее к кольцам, и рамка поворачивается. Скорость вращения вала в таком двигателе зависит и от напряжения, и от работы коммутаторов.
От колец в шаговом двигателе можно отказаться, если ротор сделать на основе постоянного магнита, а рамки с полупроводниковыми коммутаторами разместить на статоре. По сути, получается синхронная машина пт, в которой статор с коммутаторами создает вращающееся магнитное поле. Это наиболее функциональное и современное техническое решение. Оно позволяет получить наибольший крутящий момент применительно к габаритам движков. Но в принципе, шаговые двигатели, так же как и еще одна разновидность дпт — униполярные электродвигатели, — это уже совсем другая история…
Источник http://electricremont.ru/printsip-raboty-dvigatelya-postoyannogo-toka.html
Источник http://profazu.ru/knowledge/electrical/dvigateli-postoyannogo-i-peremennogo-toka.html
Источник http://domelectrik.ru/oborudovanie/dvigatel/postoyanniy-tok



